吸管|【教师也创客】“先收后发”让学生的发散性思维有的放矢( 二 )
观察发现 , 除了大拇指以外的其他4根手指都由上、中、下3个指节构成 , 而大拇指则只有2个指节 。 但此时的观察仅仅是浮于表面 , 为了更好地进行设计 , 需要更为细致的观察 , 将手数据化 , 对手掌、手指、指节等部位的尺寸和比例进行测量与计算并记录 。 由于人类的手部结构基本相同 , 学生会对此产生统一的认知 , 然而个体差异会导致每个人的手部数据存在不同 , 因此可以说 , 这个过程其实也属于“先收后发” 。
核心关键:STEAM教育中M(数学)的应用实践 。 通过计算 , 令设计出的机械手更加精确地贴近真实数值 。 同时 , 让学生产生初步的设计理念 , 即观察、模仿、设计、制作 。
第4步:结合杠杆原理 , 带领学生制作机械手的手指
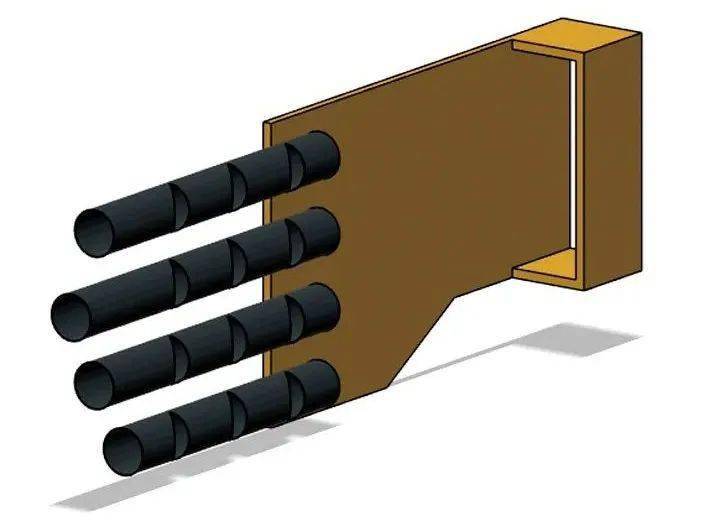
制作机械手的手指需要使用塑料吸管 , 由于材料的特性和圆柱体的结构特点 , 塑料吸管具备一定的韧性 。 可以利用这个特点 , 结合杠杆原理 , 通过牵线拉引而使机械手实现弯曲 。 先引导学生根据刚刚测量的数据规划每一节吸管的长度 , 并进行裁剪 。 裁剪成功后 , 将棉线固定在圆点处的吸管内侧(如图1) 。
图1
核心关键:STEAM教育中M(数学)的应用实践 。 机械手要稍大于手掌的真实比例 , 确保手掌后续可在机械手内部进行操控 。
【吸管|【教师也创客】“先收后发”让学生的发散性思维有的放矢】第5步:带领学生制作机械手的手指驱动及纸板手掌
手指的大致形状已经完成 , 此时可引导学生思考 , 为什么在进行这样的裁剪后 , 吸管就可以作为机械手的手指进行弯曲了呢?原来 , 通过裁剪 , 原本一根完整的吸管被分为了很多节 , 吸管的结构发生了改变 。 可以将每一节手指抽象成一个个杠杆 , 具体的杠杆结构如图2所示 。
图2
将裁剪出的缺口视为支点 , 阻力臂则是吸管自身所在的模拟力臂 。 为了让机械手的每一根手指都能用较少的力弯曲 , 可选择距离支点最远的一端固定牵引绳 。 这样当绳子被收紧时 , 其中一节指节就会蜷缩起来 , 蜷缩后的指节和下一节指节再以新的支点进行动力臂与阻力臂的结合 , 由此实现再次蜷缩 。 5根吸管手指都像这样制作 , 将牵引绳(棉线)粘贴到吸管头部 , 之后根据自己的手掌大小切割出纸板 , 并将食指、中指、无名指、小指粘贴到纸板上(如图3所示) 。

文章图片
图3
核心关键:STEAM教育中E(工程)的应用实践 。 通过抽象的杠杆 , 解释为何拉拽牵引绳吸管会蜷缩 。
第6步:带领学生制作机械手的大拇指和把手
大拇指的运动方式很明显区别于其他4根手指 , 这里需要对其操控方式进行研究 , 在研究前需要先确定把手的部分 , 可以根据图4样式进行制作 。
文章图片
图4
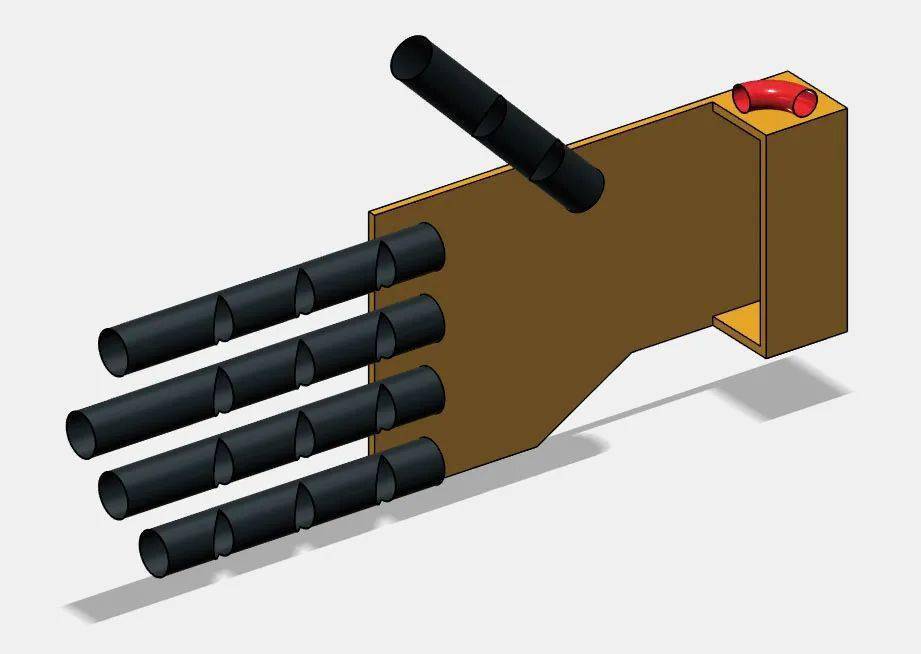
随后是粘贴大拇指的吸管 。 这里需要注意一点 , 每个人手指的粗细及长短都不一样 , 所以需要根据使用者 , 也就是学生自己的情况进行设计 , 粘贴大拇指在不同位置 。 学生根据自己的使用体验调节图5中红色弯曲吸管的位置并进行粘贴 , 通过反复使用测试及调整后 , 就可以得到一个从使用者角度出发而设计出的产品了 。
文章图片
图5
核心关键:STEAM教育中E(工程)的应用实践 。 结合使用者的使用体验及仿生效果进行实际设计 , 并制作出机械手 。
推荐阅读












- 教师|北大韦神“真实处境”跌下神坛,学生退课,班级人数不到10人
- 条例|职业本科与普通本科学士学位有区别吗
- 赵倩|课后服务让寒假暖意融融——柳林县新希望学校开展寒假免费课后服务
- 隔离点|天津一高校成隔离点粗暴转运学生物品,网友喊话去“抄作业”
- 郑州大学|郑州大学:留校郑大学生春节三天免费吃饭
- 广东|广东3年投18亿元助职教扩容提质
- 课堂|天津推出寒假线上美育实践课堂
- 质量|留住县中教师不能只靠禁令
- 评价|完善评价机制增强高校教师职业自豪感
- 教师|又是美女,棠湖中学老师斩获全国赛课大奖,成功不易、历程艰辛